¶ BPI-VP10 峰岹低压伺服模块使用说明
¶ 1 接线说明
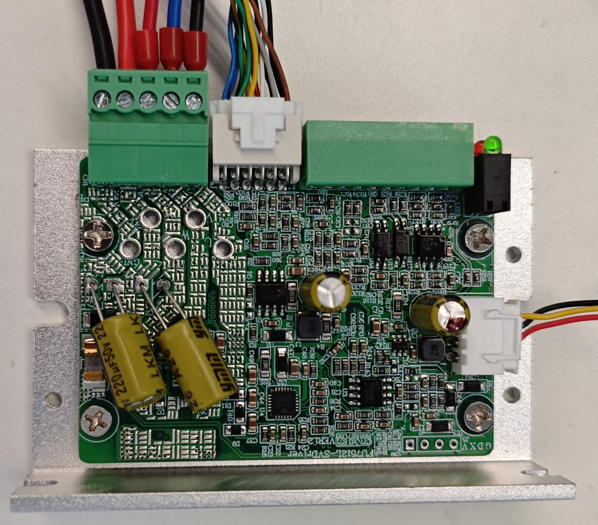
参考下面依次接上电源线、电机动力线、编码线、485串口线。电源请接24V直流电压。
主电源接通前,请再次确认电源线正负向是否正确连接。
¶ 2 试运行调试
试运行调试使用上位机软件FortiorTechServoStudio。
¶ 2.1 通信连接
(1) 安装串口驱动程序;
(2) 使用485串口数据线连接上位机和驱动器;
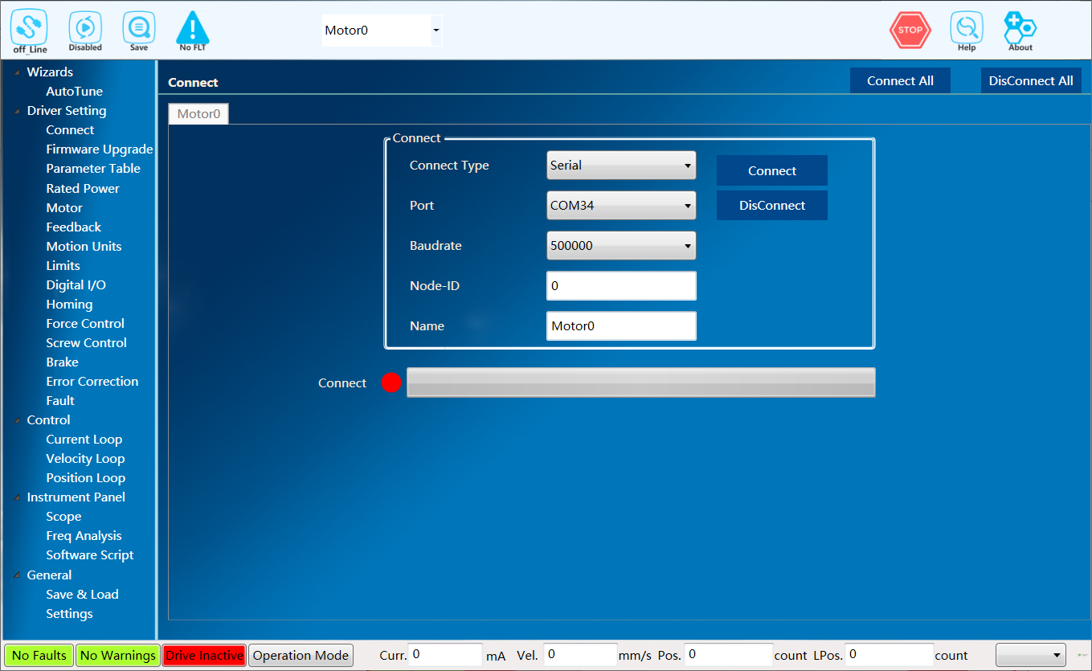
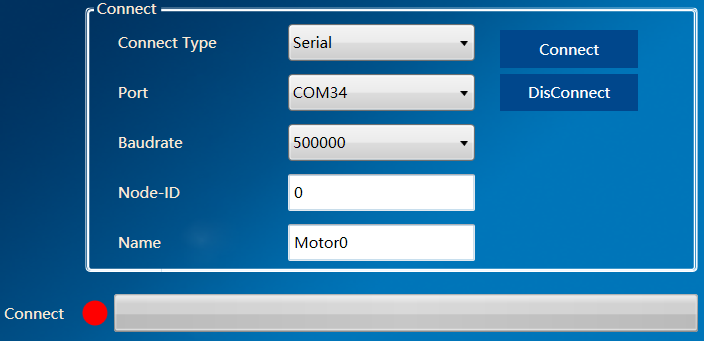
(3) 双击打开FortiorTechServoStudio.exe,在侧边导航栏,点击“连接”子菜单;
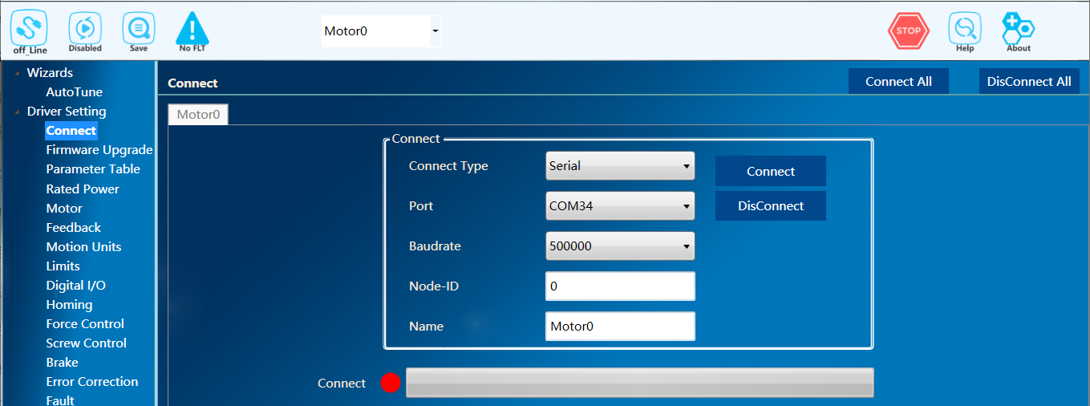
(4) 点击端口下拉框来刷新端口列表,选择与驱动器连接的端口,波特率选择500000;
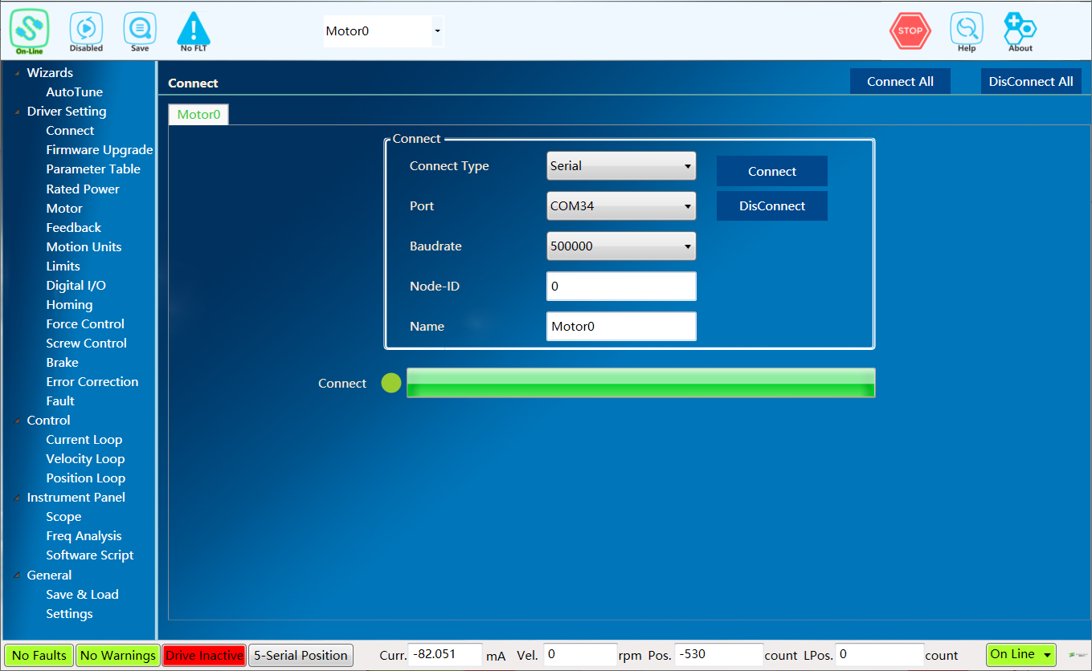
(5) 点击“连接”按钮,实现通信连接。
¶ 2.2 导入参数
第一次使用伺服驱动模块,可以先导入参数:
(1) 在侧边导航栏,点击 “备份与恢复”子菜单;
(2) 点击“导入参数”,选择附件中的.rpc文件,稍等片刻,弹出“导入参数成功”的提示框;
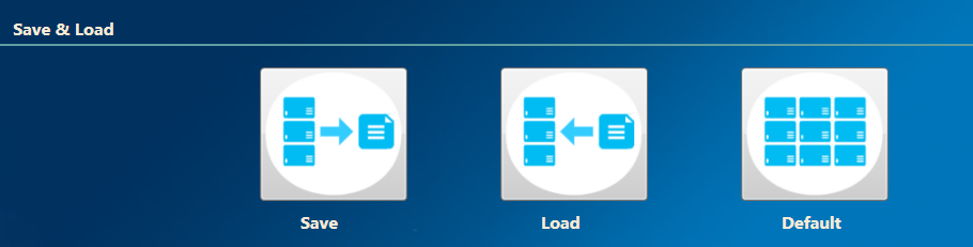
(3) 在上方工具栏,点击 “Save”按钮,保存参数到驱动器Flash。

¶ 2.3 Hall学习
由于配套的电机编码器类型是ABZ+Hall,第一次适配时需要进行一次Hall学习。 Hall学习包括了自动换相,自动换相是确定电机的相序,检测电机极对数或者极距与设置值是否一致,以及确定电角度偏置值。自动换相时电机会移动一个磁极的距离。 Hall学习是确定Hall信号和电机电角度之间的关系,Hall学习时电机会移动一个磁极的距离。 做完Hall学习后只需要保存参数到Flash或者保存到本地参数文件,以后只要不修改电机UVW接线顺序,就只需要从Flash加载参数或者导入参数文件即可,下次重新上电就可以直接跑速度环和位置环,无需重新Hall学习。
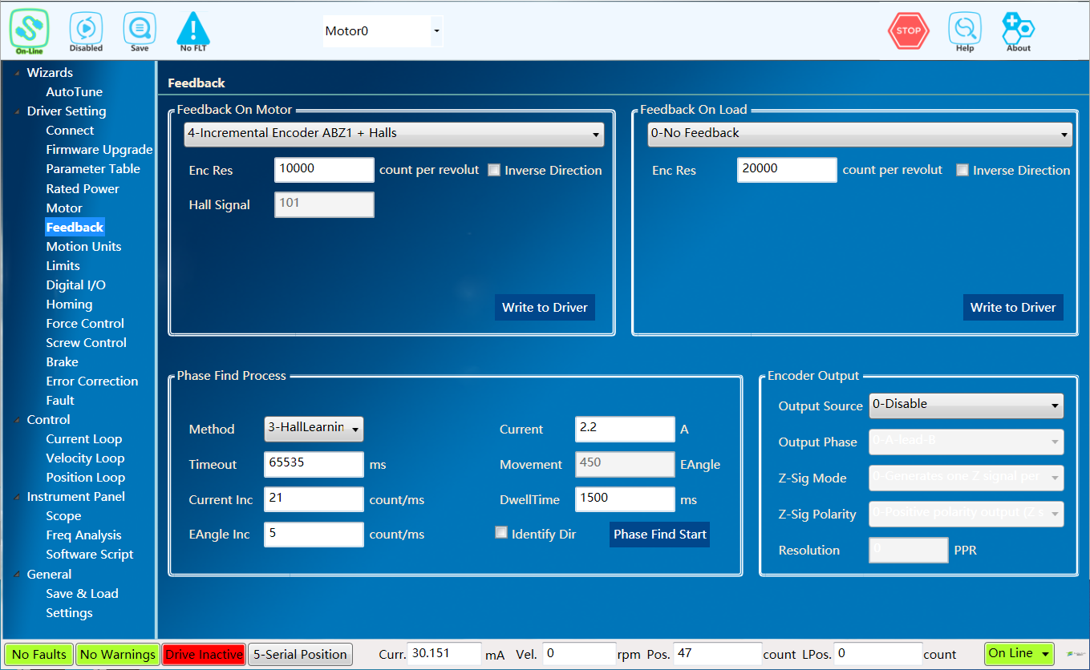
Hall学习步骤: (1) 在侧边导航栏,点击“反馈”子菜单;
(2) “寻相方式”选择“3-HallLearning”,寻相电流设为2.2A;
(3) 点击“寻找相位角”按钮。
(4) 寻相结束后会弹出框提示寻相成功,如果寻相失败,可以提高寻相电流再试试,检查一下电机及反馈参数设置是否正确,电机读数是否正常,Hall信号是否正常。
¶ 2.4 跑电机
由于刚才导入的参数文件已经把三环增益调好了,所以这时可以跳过调增益环节直接跑位置环.
跑位置环步骤:
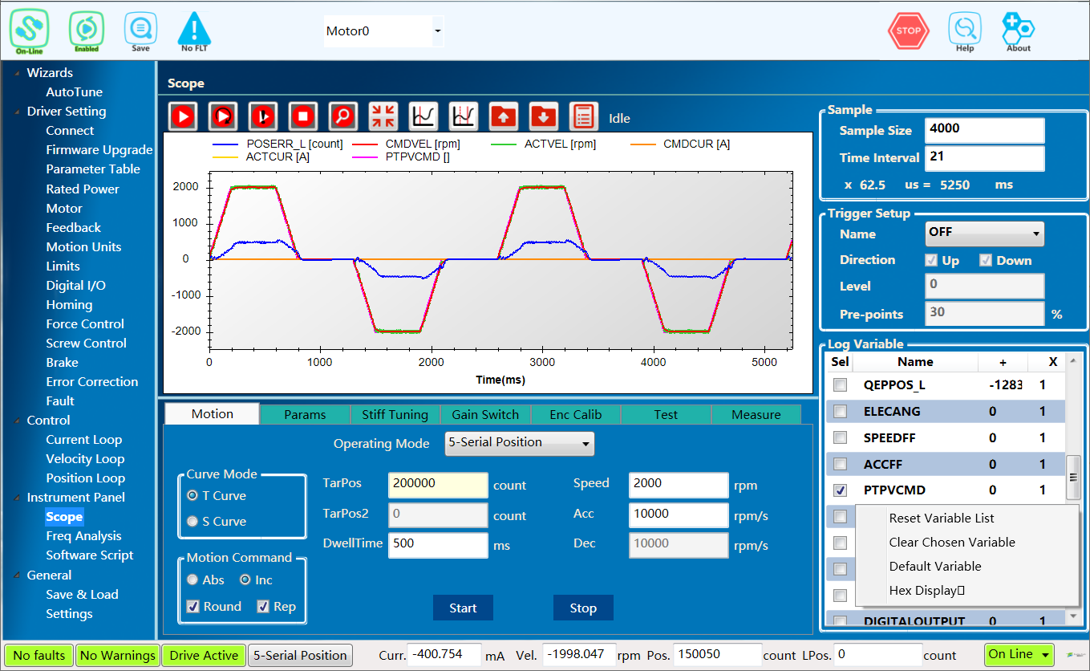
① 示波器“采样点数”设为4000,“时间间隔”设为21;
② 示波器记录变量右键选择“Default Variable”;
③ 点击示波器“连续采样”按钮,开始采集波形;
④ “运行模式”选择 “5-串口位置”;
⑤ 点击上方工具栏“Enable”,使能位置环;
⑥ “运动指令”选择“增量”“往返”“重复”,“目标位置”取一个合适的移动距离,“速度”设为额定速度的40%,“加速度”取一个偏小的值,“时间”设为500ms,点击“开始”按钮。
¶ 3 更新程序
¶ 1 通过峰岹仿真器更新程序
如果需要更新下位机程序,需要用峰岹的编程环境FTM32ForgeIDE通过峰岹仿真器来下载新的程序。
请先到 https://www.fortiortech.com/en/download/FTM32ForgeIDE 下载峰岹FTM32ForgeIDE,安装选项都选择默认。
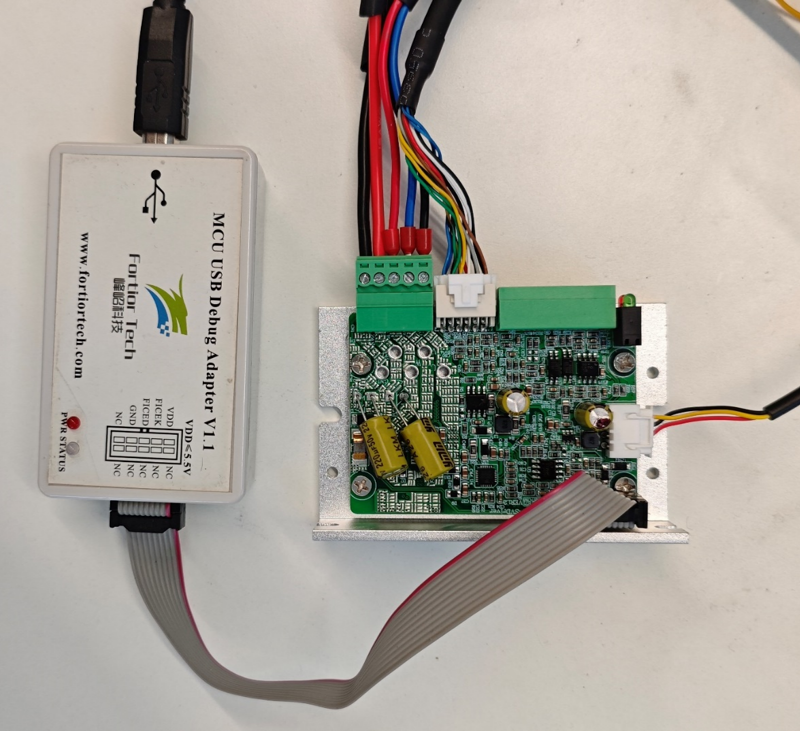
用峰岹的仿真器连接板子的下载口,接线定义如下:
| 仿真器 | 板子下载口 |
|---|---|
VDD |
V |
FICEK |
K |
FICED |
D |
GND |
G |
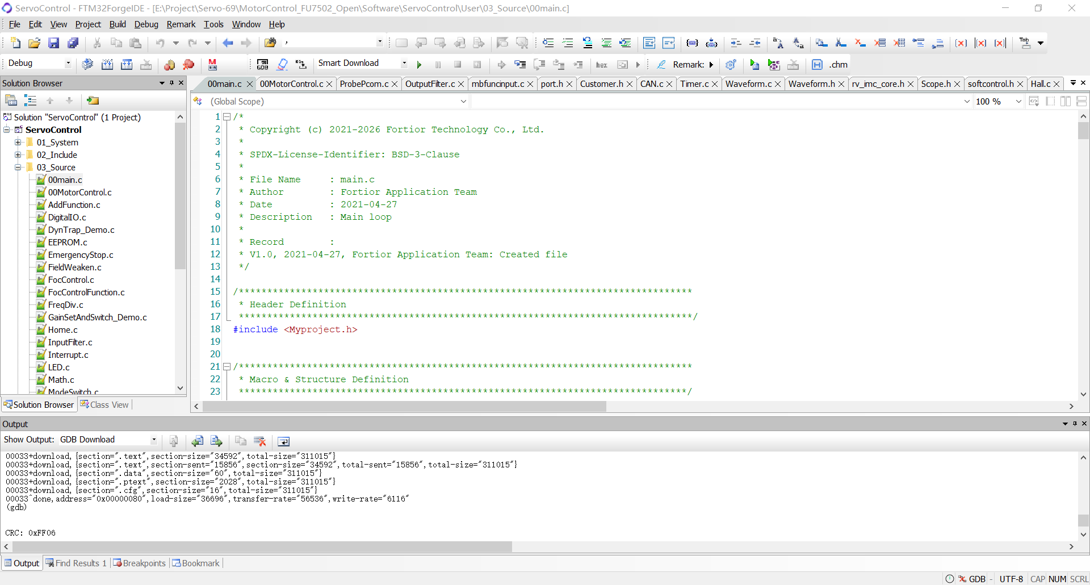
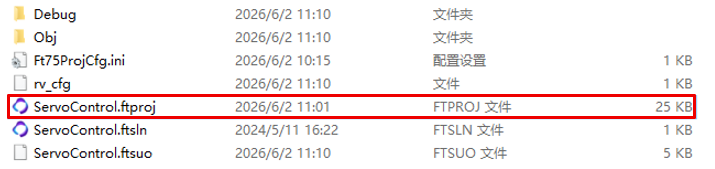
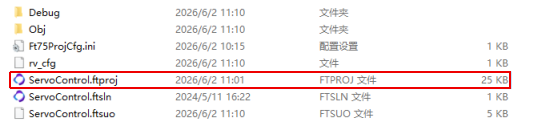
双击.ftproj打开工程
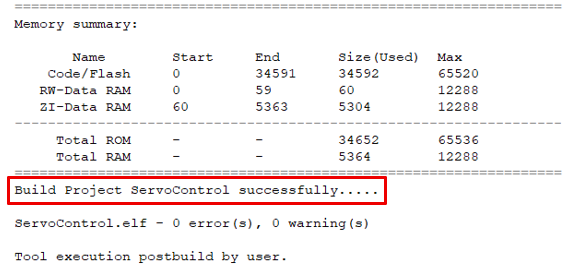
点击下图红色方框所示按钮,对代码进行编译

编译成功后输出窗口 Output 显示 “Build Project successfully”
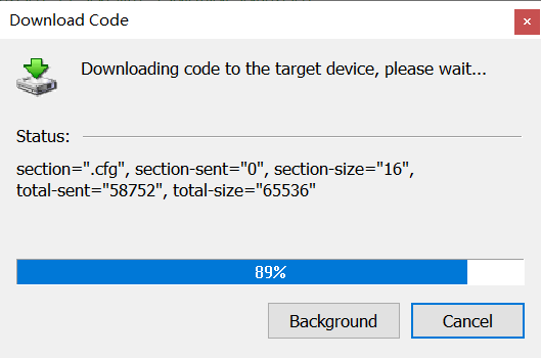
点击下图红色方框所示按钮,将程序下载到板子

等下载进度条达到 100%时,表明程序代码已成功下载到芯片中,
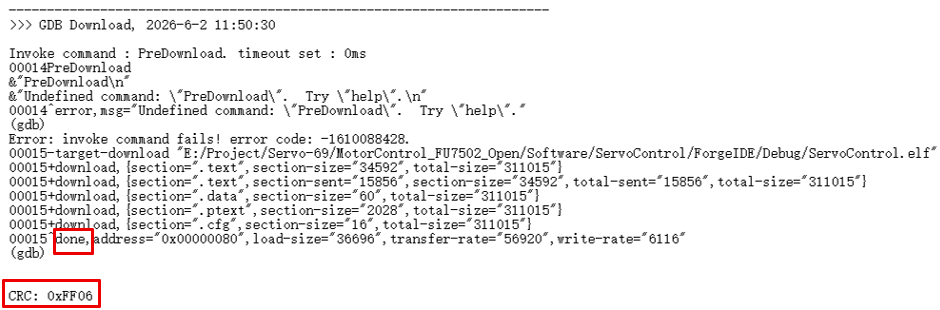
下载成功后输出窗口 Output 显示 “done”,CRC显示非零表示校验成功。
¶ 2 通过串口更新程序
板子出厂已刷Bootloader程序,也可以通过串口来更新程序。
点击按钮,对代码进行编译

编译完成后输出窗口 Output 显示如下信息,请忽略该报错。
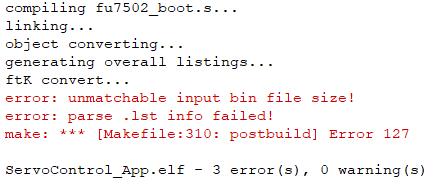
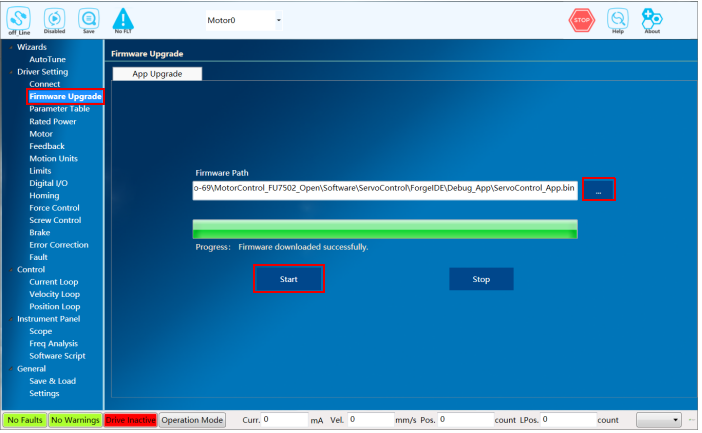
这时文件夹ServoControl\ForgeIDE\Debug_App中生成了新的ServoControl_App.bin 选择合适的通信连接设置,可以不用点击“连接”。
打开固件下载页面,选择刚才生成ServoControl_App.bin,点击“开始”。等下载进度条达到 100%时,表明程序代码已成功下载到芯片中。
注意: 1. 若出现固件下载中断或异常导致连不上上位机,可以先点击“开始”,再上电。 2. 板子出厂已刷Bootloader程序,若用峰岹仿真器下载过一次程序,则无法再通过串口更新程序。