¶ 介绍
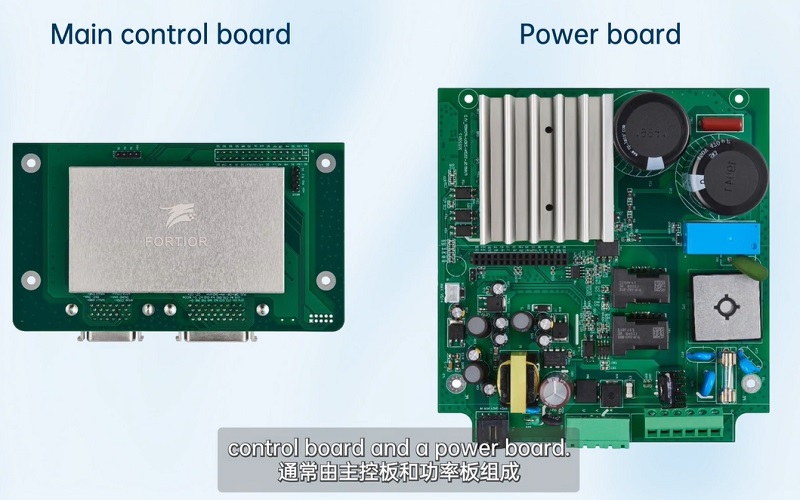
BPI-FSM8191D伺服电机控制器是香蕉派开源社区和Fortior技术共同打造的工业级伺服电机控制产品。它是一个伺服模块,用于驱动旋转伺服电机,直线伺服电机和力矩电机。在实际应用中,它由主控板和电源板组成,提供电机控制核心算法和各种通信功能。BPI-FSM8191D伺服模块主控板,配置有两个应用端口和一个电源板接口,伺服模块引脚包含多个信号接口,可以满足大部分伺服功能的调试。在不同的应用场景下,伺服电源板可以定制提供电源输入输出、电源和能耗需求。电源板具有丰富的调试接口,充分满足开发人员对不同电源和电源的需求。
¶ 应用方向
-
新能源产业:模切机、覆膜机、分切覆膜机、极耳焊接机、涂层机、外壳机、顶焊、氦气检测仪、注液机、成型柜、补料机、封焊机、分型柜、包装线等。
-
半导体行业:清洗设备、光刻机、蚀刻机、修复测试设备、划片机、晶圆探针测试设备、分选机、贴片机、邦定机等设备
-
新型显示产业:固晶机、返修机、点胶机、贴合设备、邦定设备、背光组装设备、贴片设备、切割设备、AOI设备等基础成套工艺设备。
-
光学行业:焊接机、调焦机、摆光机、装配机、成像检测等。
¶ 硬件
¶ 硬件规格
¶ 常用伺服控制器电气规格模块组成
| 伺服控制器电气规格 | ||
|---|---|---|
Number |
spec |
|
电源电路输入电源(L1,L2,L3) |
额定电压(VAC line-line)±10% |
240 |
频率(Hz) |
50 |
|
240VAC |
单相/三相 |
|
控制电路输入电源(L1C,L2C) |
240±10VAC |
单相 |
逻辑输入保险丝(延时) |
240VAC(A) |
0.5 |
STO (安全扭矩切断) |
STP DC(VDC) |
24±10% |
STO 保险丝 (延时) |
240VAC(A) |
1.5 |
电机输出 (U,V,W) |
连续输出电源 (Arms) |
4.5 |
连续输出电源 (Apeak) |
6.63 |
|
2秒内的峰值输出电流(Arms) |
14 |
|
2秒内的峰值输出电流(Apeak) |
20 |
|
PWM 频率(kHz) |
16 |
|
Soft boot |
最大浪涌电流(A) |
7 |
最大充电时间(ms) |
250 |
|
跳闸电压 |
欠压跳闸(额定)(VDC) |
50 |
过电压跳闸(VDC) |
420 |
|
超温 |
电源板过热指示故障温度(稳定温度)(℃) |
100±5% |
再生制动 |
内部母线电容(uF) |
|
VLOW(再生电路关闭)(VDC) |
380 (can set) |
|
VMAX(再生电路开启)(VDC) |
400 (can set) |
|
¶ 伺服模块控制规格
| 接口选项:模拟电压/脉冲指令/RS232控制规格 | ||
|---|---|---|
Item |
spec |
explain |
电机 |
Ac and DC |
旋转伺服电机、直线伺服电机 |
自动配置 |
自动配置电机相位和相线设置 |
|
运行模式 |
可选择模式 |
转矩控制、速度控制、位置控制 |
转矩控制 |
输入指令/输出指令 |
速度命令/PCOC |
性能 |
刷新率 rate62.5us (16kHz) |
|
阶跃响应时间 |
||
控制方式 |
DQ, PI |
|
参考命令 |
simulate±10VDC,serial RS232 |
|
自动调节 |
手动调整当前循环参数 |
|
速度控制 |
输入指令/输出指令 |
速度命令 / PCOC |
性能 |
刷新率: 125 μs (8 kHz) |
|
可选速度控制方法 |
PI |
|
滤波器 |
一阶低通滤波器,两个级联的一阶低滤波器 |
|
参考命令 |
simulation±10 VDC, serial RS232 or USB |
|
位置控制 |
输入指令/输出指令 |
位置指令/速度指令 |
性能 |
刷新率:250us(4kHz) |
|
控制方式 |
PID和加速度前馈 |
|
参考命令 |
Pulse & direction with electronic drive,serial ,serial RS232 |
|
状态显示 |
形式 |
Fase 7 LED(红色),显示驱动器状态(报警、运行、启用等) |
电子齿轮 |
方法 |
用户定义的齿轮比 |
GUI |
UI |
基于Windows串口软件 |
功能 |
设置连接、驱动器信息、电源信息、电机、反馈、I/O选择/配置、运动设置/调整、故障历史/状态显示等。 |
|
向单位旋转 |
位置 |
(Counts) |
速度 |
每分钟(rpm) |
|
加速/减速 |
rps/s |
|
线单元 |
位置 |
(Counts)、mm |
速度 |
mm/s |
|
加速/减速 |
mm/s2 |
|
¶ 伺服模块通信规范
| 通信规范 | |
|---|---|
number |
spec |
RS232 |
基于Modbus RTU |
波特率: 19200 bit/s |
|
最大导体长度: 10 m |
|
高速串行(专用于观察波形) |
基于自定义协议 |
波特率: 115200 - 750000 bit/s |
|
最大导线长度:2 m |
|
¶ 伺服模块 I/O规格
| 伺服模块I/O规格 | ||
|---|---|---|
Item |
standard |
explain |
模拟输入 |
电压范围 |
模拟±10 VDC有限差分 |
零衰减 |
100 Hz |
|
带宽 (-3 dB) |
500 Hz |
|
脉冲和方向 |
信号 |
RS 422线路接收机 |
最大输入频率 |
1.6 MHz (will未来将增加到5MHz) |
|
数字输入(8通道) |
信号 |
可配置、光隔离、漏极输入。 |
(通用IO可配置相关引脚功能) |
电压 |
24 V |
最大输入电流 |
10 mA |
|
传输延迟时间 |
1 ms |
|
数字输出(6通道) |
信号 |
可配置,光隔离,漏极输入。 |
(通用IO可配置相关引脚功能) |
电压 |
24 V |
最大输入电流 |
40 mA |
|
传输延迟时间 |
1 ms |
|
主I/O功能信号 |
功能 |
explain |
输入信号(可配置端口) |
正极限 |
正限位开关 |
负极限 |
负限位开关 |
|
返回原点 |
原点开关 |
|
电机启用 |
外部使能信号 |
|
ALM-RST |
外部清除报警信号 |
|
速度限制 |
带速度限制输入的扭矩控制 |
|
输出信号(端口可配置) |
伺服定位完成 |
伺服执行定位完成信号 |
伺服停止 |
伺服执行停止信号 |
|
伺服报警 |
伺服错误报警信号 |
|
伺服制动装置 |
伺服制动控制信号 |
|
伺服寻相完成 |
伺服寻相完成信号 |
|
伺服归零完成 |
伺服归零完成信号 |
|
¶ 伺服模块支持电机反馈规格
| 支持的电机反馈规格 | ||
|---|---|---|
电机反馈 |
规格 |
explain |
总结 |
驱动器输出电压 |
5 VDC |
驱动器的最大输出电流 |
250 mA |
|
最大电缆长度 |
AWG 28 – 3 m; AWG 24 – 10 m |
|
增量编码器 |
信号 |
带(或不带)零/霍尔信号AB正交信号编码器差分输出 |
AB正交最大输入频率 |
1.6 MHz (正交性条件) (It未来将增加到5MHz) |
|
最小零脉冲宽度 |
1 µs |
|
霍尔传感器 |
信号 |
single-ended |
正弦编码器(将在下一版本中添加) |
信号 |
正弦余弦差,有或没有霍尔 |
信号电平 |
1 Vpp @ 2.5 V |
|
最大输入频率 |
270 kHz |
|
输入阻抗 |
120 Ω |
|
插值 |
Max to 16384 (14 bit) |
|
有效内插 |
Max to 4096 (12 bit) |
|
¶ 电机信号反馈线引脚定义
电机反馈接口根据实际应用中使用的反馈装置类型进行接线。有关详细信息,请参见下面的引脚出口表。
电机温度传感器使用12/25引脚,并通过模块内部被拉高至5V。
| 电机信号反馈线引脚定义 | |||||
|---|---|---|---|---|---|
Pin define |
Module pin |
function |
Pin define |
Module pin |
function |
1 |
97 |
|
14 |
98 |
incremental encoder A- |
2 |
96 |
|
15 |
95 |
|
3 |
93 |
incremental encoder Z+ |
16 |
94 |
incremental encoder Z- |
4 |
116 |
Hall U+ |
17 |
115 |
Hall V+ |
5 |
114 |
Hall W+ |
18 |
/ |
/ |
6 |
/ |
/ |
19 |
/ |
/ |
7 |
/ |
/ |
20 |
/ |
/ |
8 |
/ |
/ |
21 |
/ |
/ |
9 |
111 |
Sine encoder sine+ |
22 |
110 |
Sine encoder sine- |
10 |
109 |
Sine encoder cosine+ |
23 |
108 |
Sine encoder cosine- |
11 |
3、4 |
5V power |
24 |
Common ground with module |
ground(5V loop) |
12 |
91 |
Motor temperature sensor |
25 |
90 |
Motor temperature sensor |
13 |
3、4 |
5V power |
26 |
/ |
shield |
¶ 伺服模块I/O端口引脚定义
数字/模拟输入和输出根据您的应用要求进行接线。为了保持数字I/O隔离,24V环路的接地连接到引脚1和19,这两个引脚驱动数字输入引脚,并要求您提供24V信号。
| 伺服模块I/O端口引脚定义 | |||
|---|---|---|---|
Pin define |
Module pin |
function |
explain |
1 |
64 |
Digital input to the public ground |
user provides a 24V input signa ground |
2 |
107 |
Equivalent encoder output Z+ |
Equivalent encoder output signal Z forward direction |
3 |
/ |
/ |
|
4 |
106 |
Equivalent encoder output Z- |
Equivalent encoder output signal Z negative |
5 |
104 |
Equivalent encoder output B+ |
Equivalent encoder output signal B forward direction |
6 |
/ |
/ |
|
7 |
105 |
Equivalent encoder output B- |
Equivalent encoder output signal B negative |
8 |
112 |
Analog input AN+ |
Diff forward direction of analog instruction input |
9 |
103 |
Equivalent encoder output A- |
Equivalent encoder output signal A negative |
10 |
Common ground with module |
DGND |
DGND |
11 |
102 |
Equivalent encoder output A+ |
Equivalent encoder output signal A forward direction |
12 |
113 |
Analog input AN- |
Differential analog instruction input in negative direction |
13 |
Common ground with module |
DGND |
DGND |
14 |
87 |
direction input - |
Direction Indicates the negative direction of the input |
15 |
79 |
Digital input 2 |
Optically isolated programmable digital input,Read with IN2 |
16 |
86 |
direction input |
Direction Indicates the positive direction of the input |
17 |
89 |
impulse input |
The pulse input is positive |
18 |
88 |
impulse input - |
The negative direction of the pulse input |
19 |
72 |
Digital output to the public ground |
provides 24V pull-up ground |
20 |
84 |
RS485 ommunication input - |
RS485 ommunication input -(Or B terminal) |
21 |
83 |
485 input |
RS485 communication input +(Or A terminal) |
22 |
73 |
Digital input 8 |
Optically isolated programmable digital input 8 |
23 |
74 |
Digital input 7 |
Optically isolated programmable digital input 7 |
24 |
75 |
Digital input 6 |
Optically isolated programmable digital input 6 |
25 |
Common ground with module |
DGND |
DGND |
26 |
76 |
Digital input 5 |
Optically isolated programmable digital input 5 |
27 |
77 |
Digital input 4 |
Optically isolated programmable digital input 4 |
28 |
78 |
Digital input 3 |
Optically isolated programmable digital input 3 |
29 |
Common ground with module |
DGND |
DGND |
30 |
68 |
Digital output 3 |
Optically isolated programmable digital output, can be read with OUT3 |
31 |
65 |
Digital output 6 |
Optically isolated programmable digital output, can be read with OUT6 |
32 |
69 |
Digital output 2 |
Optically isolated programmable digital output, can be read with OUT2 |
33 |
80 |
Digital input 1 |
Optically isolated programmable digital input,Read with IN1 |
34 |
70 |
Digital output 1 |
Optically isolated programmable digital output, can be read with OUT1 |
35 |
66 |
Digital output 5 |
Optically isolated programmable digital output, can be read with OUT5 |
36 |
67 |
Digital output 4 |
Optically isolated programmable digital output, can be read with OUT4 |
¶ 伺服模块保护功能及使用环境要求
| 伺服模块保护功能及使用环境要求 | |
|---|---|
item |
spec |
保护功能 |
过流、欠压、过压、超温、反馈缺失、STO信号未连接、位置跟随错误、超速、参数错误等。 |
防飞车保护功能 |
电机寻相时,屏蔽外部脉冲输入信号功能(脉冲和方向)和接收运动指令功能(RS232),防止电机事故。 |
¶ 发展
¶ BPI-FSM8191D伺服电机控制器安装
¶ 安装说明
-
按照以下步骤安装和配置驱动程序模块。
-
根据所需的工作功率,选择合适的电源基板。
-
完成所有电气连接:
-
将伺服模块安装到模块转换底板上
-
将开关基板连接到电源板
-
电机
-
电机反馈
-
安全扭矩开关(STO)或使用跳线短路
-
输入输出控制信号
-
AC输入电源
-
-
使用USB/232电缆将驱动器连接到PC。
-
电源驱动器和PC。
-
连接到现场总线设备(可选)。
-
打开Forecast TechServoStudio.exe(无需安装)。
-
使用Forecast TechServoStudio配置和调试驱动器。
¶ FortiorTechServoStudio 测试软件
FortiorTechServoStudio Forecast TechServoStudio是随伺服模块提供的图形用户界面(GUI),用于安装、配置和调试驱动器。Forecast TechServoStudio可用于在线调试驱动器参数并执行特定的驱动器操作。
FortiorTechServoStudio支持两种初始系统配置方法:
-
使用【常规-备份和恢复】,点击“默认参数”完成初始参数配置,然后在【电机】中配置电机参数,在【反馈】中配置编码器分辨率。
-
使用[常规-备份和恢复],电机“导入参数”导入先前配置的电机参数数据。
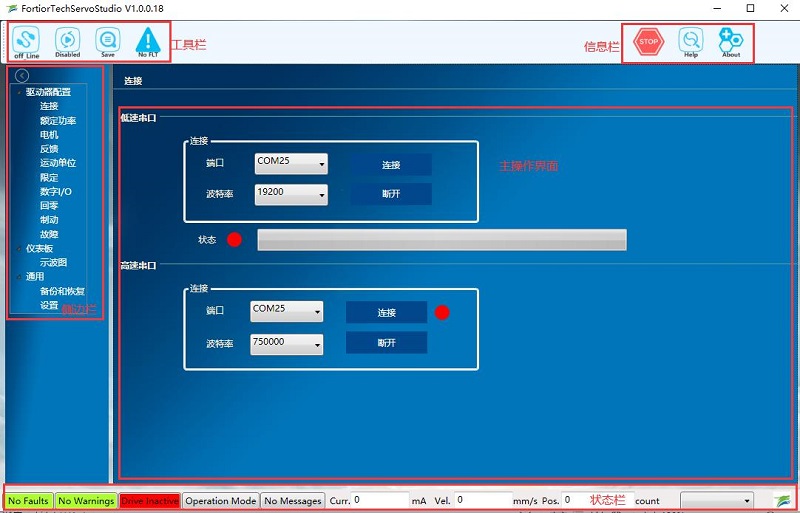
FortiorTechServoStudio主界面由5个功能区组成:
-
按钮,包含常用的快捷功能按钮。
线下|联机-切换Forecast TechServoStudio联机/脱机并显示连接状态。请参阅[联机和脱机驱动器]部分。
使|Disable -启用/禁用驱动器并显示驱动器的启用状态
保存-将当前驱动器RAM中的参数保存到驱动器存储器中。建议在配置参数后使用保存按钮将参数值保存到内存中。
无FLT -清除驱动器故障。当变频器出现故障时,此位变为红色,电机可以清除故障。 -
信息栏:
停止-停止电机并禁用驱动器。
帮助-Forecast TechServoStudio软件在线帮助。此版本的软件未启用此功能。
关于-有关软件版本的信息。在此版本中,该功能不可用。 -
侧边栏:
包括Forecast TechServoStudio A界面的导航菜单。
可以使用此箭头按钮隐藏或显示边栏。 -
主操作界面:显示交互式界面,用于查看、设置和测试参数以及配置驱动器。这些接口在本手册的其他章节中有详细描述
故障显示:若无故障,状态栏背景为绿色。如果有故障,则为红色。点击此区域打开[故障]屏幕。
警告:如果没有警告,则状态栏的背景为绿色;如果有警告,则为红色。
驱动器状态:当驱动器启用时,状态栏的背景为绿色,并显示驱动器活动。当驱动器未启用时,它是红色和“。 -
状态栏:显示驱动器状态。
故障显示:若无故障,状态栏背景为绿色。如果有故障,则为红色。点击此区域打开[故障]屏幕。
警告:如果没有警告,则状态栏背景为绿色;如果有警告,则为红色(目前不区分警告和故障)。
驱动器状态:当驱动器启用时,状态栏的背景为绿色,并显示驱动器活动。如果驱动器未启用,则显示红色,并显示驱动器未激活。
运行模式:此段的背景为灰色。显示当前运行模式。
Curr:显示当前运行电流
Vel:显示当前电机速度。
Pos:显示电机的当前位置。
联机/脱机:上位机与驱动器的连接状态
¶ 上位机
香蕉派 BPI-FSM1819D伺服电机控制器调试教程: https://www.youtube.com/watch?v=At7HOSH51MA
¶ 参考文件
香蕉派 BPI-FSM1819D伺服模块硬件介绍及快速上手: https://www.youtube.com/watch?v=eIMwual-9D8